行业新闻
如何控制 BLDC无刷电机?
BLDC 电机因其在小封装中提供高效率的能力、较长的使用寿命和出色的可控性而备受关注。在本节中,我们将研究如何控制它们以有效利用它们的潜在能力。
连接更复杂
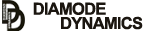
图 1 显示了一种典型的 BLDC 电机——内转子型的外观和内部结构。请注意,该电机的永磁体连接到其转子上,而线圈则放在外面。这与典型的有刷直流电机完全不同,后者线圈在转子上,永磁体在外面。由于 BLDC 电机的转子不使用线圈,因此无需为其供电。这就是为什么没有刷子的原因。
但是 BLDC 电机比有刷电机更难驱动。对于有刷电机,您需要做的就是将电源连接到电机的正极和负极引线。BLDC电机在引线数量上与有刷直流电机不同,连接也比较复杂。
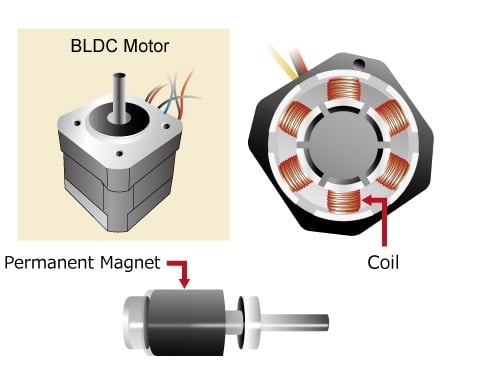
图 1:BLDC 电机的内部和外部。
转子是永磁体,不通过电流。取消了电刷和换向器,从而延长了使用寿命。
控制磁场
要旋转 BLDC 电机,需要控制流入线圈的电流的方向和时序。图 2(a) 显示了 BLDC 电机的定子(线圈)和转子(永磁体)。让我们用这个插图来看看转子是如何转动的。在本例中,我们使用三个线圈,而在实践中使用六个或更多线圈更为常见。但在这里我们只看三个线圈,间隔为 120º。正如我们在上一节中提到的,电机执行将电能转换为机械能的任务。那么我们插图中的电机是如何做到这一点的呢?让我们看看里面发生了什么。
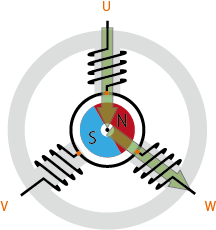
图 2(a):BLDC 电机的旋转原理。
典型配置:三个线圈,间距为 120º。通过控制相位和线圈电流来驱动。
在我们的示例中,我们展示了一个 3 线圈电机。让我们标记线圈 U、V 和 W。请记住,电流通过线圈会产生磁场。因为有三个线圈,所以我们可以通过三个路径来传递电流;我们可以将这些称为 U 相(电流流入线圈 U)、V 相(流入线圈 V)和 W 相。让我们先看看 U 相。如果电流仅通过 U,则会产生如图中箭头所示的磁通量. 2(b)。实际上,所有三个线圈都通过一根导线相互连接,并且不可能单独产生 U 相。图 2(c) 显示了当电流通过线圈 U 和 W(“UW”相)时会发生什么,箭头再次显示每个线圈产生的通量。图 2(d) 中的宽箭头是合成通量——来自 U 和 W 的组合磁场的结果。
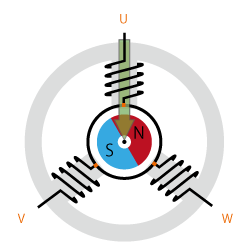
图 2(b):BLDC 电机旋转原理。
电流先流过 U,然后流过 W。箭头表示线圈 U 产生的磁通。
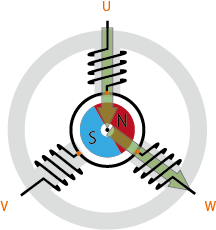
图 2(c):BLDC 电机旋转原理。
电流流过 U 和 W。两个箭头分别表示线圈 U 和 W 产生的通量。
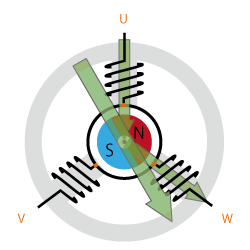
图 2(d):BLDC 电机旋转原理。
宽箭头显示合成通量——U 和 W 产生的通量之和。
旋转是通过不断切换磁通来维持的,这样永磁体就会不断地追逐由线圈感应的旋转磁场。换句话说,U、V 和 W 的通电必须不断切换,以使合成磁通不断移动,从而产生一个不断拉动转子磁铁的旋转磁场。
图 3 显示了通电相和磁通之间的关系。如您所见,依次切换模式 1 到 6 将使转子顺时针旋转一圈。可以通过控制相位变化的速率来控制旋转速度。我们对这里描述的 6 模式控制方法使用名称“120 度传导控制”。
图 3:不断变化的合成磁通不断拉动转子磁铁,导致转子转动。
正弦控制提供平滑旋转
通过 120 度传导控制,只有六个合成磁通方向可用于驱动电机。例如,从模式 1 切换到模式 2(见图 3)会使合成磁通方向移动 60º,从而相应地拉动转子。从模式 2 切换到模式 3 会将磁通方向再移动 60º,再次拉动转子。重复这个过程会产生一个连续的旋转,但它是一个有点生涩的旋转。在某些情况下,这种颠簸会产生不必要的振动和机械噪音。
作为 120 度传导控制的替代方案,我们可以使用正弦控制来实现更平稳、更安静的操作。通过 120 度传导控制,电机通过六个固定合成磁通连续循环进行控制。正如您在图 2(c) 中所看到的,U 和 V 都产生等量级的通量。然而,通过更仔细地控制 U、V 和 W 中的电流,我们可以在每个线圈上产生不同的通量大小,从而使我们能够更精确地改变合成通量。(见图 4。)
通过仔细调整流入三相中的每一相的电流,我们可以实现合成磁通的更连续变化,从而使电机旋转更平稳。
图 4:正弦控制。
通过控制三相的电流,可以比120度导通控制更精确地控制合成磁通的大小和方向,从而实现更平稳的旋转。合成通量不再限于六个离散方向。
变频器控制
让我们再看看 U、V 和 W 中电流的性质。为简单起见,让我们看看它如何与 120 度传导控制一起工作。回顾图 3,我们看到在模式 1 中,电流从 U 流向 W;在模式 2 中,从 U 到 V。如图中的箭头所示,通电线圈组合的每次变化都会引起磁通方向的相应变化。
现在看看模式 4。这里我们有电流从 W 移动到 V;这与模式 1 正好相反。对于有刷直流电机,可以使用电刷和换向器实现这种类型的电流反转。BLCD 电机不能根据定义使用电刷或其他机械接触来实现这种反转。相反,他们通常使用逆变器电路来实现这种控制。
通过使用逆变器电路来调整每个线圈的电压,我们还可以控制电流的大小。调节电压的典型方法是使用脉宽调制 (PWM)。在这种方法中,我们通过延长或减少脉冲导通时间(也称为“占空比”:导通时间表示为 ON+OFF 切换间隔的比率)来改变电压。增加占空比与提高电压的效果相同;降低占空比与降低电流具有相同的效果。(见图 5。)
PWM 可以使用配备专用 PWM 硬件的 MPU 来实现。虽然 120 度传导控制只需要两相电压控制并且在软件中相对容易实现,但正弦控制使用三相电压控制并且要复杂得多。因此,合适的逆变器电路对于驱动 BLDC 电机至关重要。请注意,逆变器也可用于交流电机。但是,当提及消费电子产品时使用“逆变器类型”等术语时,它通常指的是 BLDC 电机。
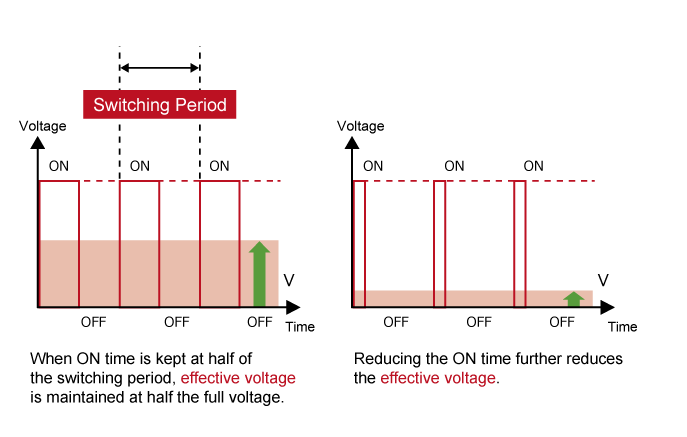
图 5:PWM 输出与输出电压的关系。
改变占空比(每个开关周期内的导通时间)会改变有效电压。
BLDC 电机和位置传感器
正如我们所见,我们通过不断改变线圈产生的磁通的方向来驱动 BLDC 电机。转子上的永磁体不断追逐变化的旋转磁场,使转子转动。
由于 BLDC 电机控制必须与转子(磁铁)位置协调,因此这些电机通常还包括用于检测该位置的传感器。在转子位置未知时施加电流可能会导致转子转向错误的方向。传感器的使用防止了这个问题。
表 1 列出了这些电机中使用的典型传感器类型。不同类型的传感器用于不同的控制方法。霍尔元件的信号输入间隔为 60º,最适合使用 120 度传导控制的电机——其中所需的只是确定要通电的相位。更精确的传感器——例如旋转变压器和光学编码器——更适合使用矢量控制的电机(见下文),其中通量得到更精细的控制。
虽然传感器具有明显的优势,但它们也有缺点。一些传感器对灰尘的耐受性低,需要定期维护。其他的只能在有限的温度范围内正常运行。传感器的使用以及所有伴随电路的实现增加了制造成本;高精度传感器当然是最昂贵的。目前市场上的“无传感器 BLDC 电机”完全消除了传感器的使用,作为降低零件和维护成本的一种方式。但是在本次会议中,我们将解释操作原理,我们假设使用传感器来跟踪转子位置。
| 传感器类型 | 典型应用 | 特征 |
|---|---|---|
| 霍尔元件 | 120度 进行控制 | 每 60 度获取一次信号。相对便宜的。耐热性差。 |
| 光编码器 | 正弦波控制、矢量控制 | 两种类型:增量(检测距原点的位移)和绝对(检测当前位置)。高分辨率。对灰尘的耐受性差。 |
| 解析器 | 正弦波控制、矢量控制 | 高分辨率。结实的。可在恶劣环境中使用。 |
表 1:位置传感器类型和特性
正如我们所见,正弦控制通过利用三相电流平滑控制磁通来实现平滑旋转。120 度导通控制在任一时间只为三相(U、V 和 W)中的两相通电,而正弦控制要复杂得多——因为它必须准确地向所有三相提供不同量的电流。
减少这种复杂性的一种方法是使用矢量控制,其中使用计算来转换坐标空间,允许将 3 相 AC 值作为 2 相 DC 值处理。然而,这种方法只有在高分辨率位置信息可用于这些计算时才有效。获取此信息的一种方法是使用高精度传感器(光学编码器、旋转变压器等)。另一种“无传感器”方式是根据进入每一相的电流幅度来估计位置。在任何一种情况下,坐标空间的转换都允许直接控制与扭矩相关的电流——允许以很少的电流进行高效运行。
矢量控制的实现需要大量的数学处理,包括快速求解转换坐标空间所需的三角函数的能力。用于控制这些电机的 MCU 通常包括一个 FPU(浮点单元),并且必须能够提供可观的处理能力。
精彩动态
重要新闻
-
从零开始的无人船制作-系统整体框架指南
 前言 首先无人船要无人,就得能自己跑;自己跑,就得知道它自己的GPS坐标和它自己的姿态。正如飞机一样, ...2022-06-16
前言 首先无人船要无人,就得能自己跑;自己跑,就得知道它自己的GPS坐标和它自己的姿态。正如飞机一样, ...2022-06-16 -
在船体清洁机器人中引入无刷直流电机
 介绍一种专门设计的机器人,可以在船体中导航并去除累积的生物膜层。机器人设计期间的组件选择对于这款 ...2021-12-25
介绍一种专门设计的机器人,可以在船体中导航并去除累积的生物膜层。机器人设计期间的组件选择对于这款 ...2021-12-25 -
水下机器人
 如今,管理水下领域的技术已经出现,从而产生了复杂的水下机器人。 市场上存在的大部分水下机器人都专注 ...2021-12-24
如今,管理水下领域的技术已经出现,从而产生了复杂的水下机器人。 市场上存在的大部分水下机器人都专注 ...2021-12-24