行业新闻
水下机器人要解决的核心问题是什么?
水下机器人最核心的问题还是水下通讯、智能控制、续航、推进器。通常我们说的水下机器人主要指无人潜水器,包括ROV、AUV两种。
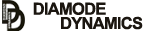
ROV(有缆水下机器人)
ROV不存在续航、通讯的问题,控制起来也相对容易,通过电缆从母船获取电力、接受控制信号。
ROV主要由地面端、水下端组成,地面端包含供电系统、控制台、电缆绞车等,水下端包含潜水器本体及安装在本体上的推进器、相机、照明灯、深度传感去、作业工具(机器手、切割器),主要进行水下巡检、探测应用。
虽然线缆提供了足够的续航和相对容易的遥操作控制,但是却限制了水下ROV的活动空间,作业种类,基于此自主水下机器人应运而生。
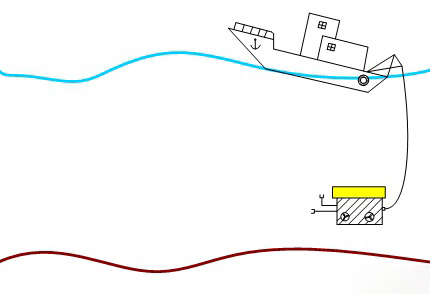
AUV(自主水下机器人)
自主水下机器人(AUV),也称无缆水下机器人,主要用于水下抓取、捕捞。
由于没有母船供电,依靠自身携带电源模块供电,续航有限,水下无缆机器人一般依靠水声通讯,存在时延现象,实时控制难度大,这两块都是一个挑战。
另一方面,AUV是自主导航,依靠各类传感器,识别陌生环境,建立环境模型,自主决策,躲避障碍,到达指定点完成任务,综合了图像识别、水声通讯、信息融合、路径规划、自主避障、智能控制等技术,这方面有待继续突破。
总之,ROV由水面工作人员实时观测水下并远程遥操作,智能化程度不高,缺点是有线缆限制,活动空间有限,AUV活动范围大,但续航、通讯、智能控制是一个挑战。
ROV(有缆水下机器人)
ROV不存在续航、通讯的问题,控制起来也相对容易,通过电缆从母船获取电力、接受控制信号。
ROV主要由地面端、水下端组成,地面端包含供电系统、控制台、电缆绞车等,水下端包含潜水器本体及安装在本体上的推进器、相机、照明灯、深度传感去、作业工具(机器手、切割器),主要进行水下巡检、探测应用。
虽然线缆提供了足够的续航和相对容易的遥操作控制,但是却限制了水下ROV的活动空间,作业种类,基于此自主水下机器人应运而生。
AUV(自主水下机器人)
自主水下机器人(AUV),也称无缆水下机器人,主要用于水下抓取、捕捞。
由于没有母船供电,依靠自身携带电源模块供电,续航有限,水下无缆机器人一般依靠水声通讯,存在时延现象,实时控制难度大,这两块都是一个挑战。
另一方面,AUV是自主导航,依靠各类传感器,识别陌生环境,建立环境模型,自主决策,躲避障碍,到达指定点完成任务,综合了图像识别、水声通讯、信息融合、路径规划、自主避障、智能控制等技术,这方面有待继续突破。
总之,ROV由水面工作人员实时观测水下并远程遥操作,智能化程度不高,缺点是有线缆限制,活动空间有限,AUV活动范围大,但续航、通讯、智能控制是一个挑战。
精彩动态
重要新闻
-
从零开始的无人船制作-系统整体框架指南
 前言 首先无人船要无人,就得能自己跑;自己跑,就得知道它自己的GPS坐标和它自己的姿态。正如飞机一样, ...2022-06-16
前言 首先无人船要无人,就得能自己跑;自己跑,就得知道它自己的GPS坐标和它自己的姿态。正如飞机一样, ...2022-06-16 -
在船体清洁机器人中引入无刷直流电机
 介绍一种专门设计的机器人,可以在船体中导航并去除累积的生物膜层。机器人设计期间的组件选择对于这款 ...2021-12-25
介绍一种专门设计的机器人,可以在船体中导航并去除累积的生物膜层。机器人设计期间的组件选择对于这款 ...2021-12-25 -
水下机器人
 如今,管理水下领域的技术已经出现,从而产生了复杂的水下机器人。 市场上存在的大部分水下机器人都专注 ...2021-12-24
如今,管理水下领域的技术已经出现,从而产生了复杂的水下机器人。 市场上存在的大部分水下机器人都专注 ...2021-12-24