INDUSTRY NEWS
How to design an underwater thruster?
What's your goal?
In thruster design, you really can't have it all. You can't have a thruster that produces tons of thrust at a low speed and also works efficiently at high speed. So you have to decide what's most important to you. At which operating condition do you want your thruster to be optimized? If you're designing a long-endurance solar-powered ASV, you probably want to optimize your thruster for efficiency at "cruise" speed, perhaps 2 or 3 knots. On the other hand, an ROV thruster needs to develop as much thrust as possible at zero forward speed, with less regard for efficiency. So begin by deciding what's important to you, then keep reading.
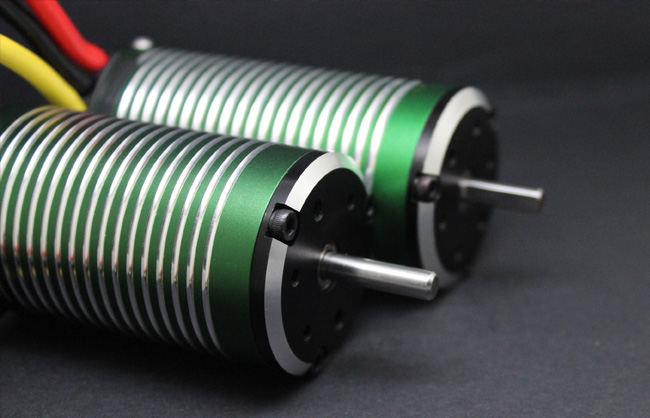
Motor choice
As stated above, we'll assume that you're going to use a brushless DC motor in your thruster. Brushless motors will generally be more efficient and more durable than brushed motors. Brushed motors are cheaper since they don't need a motor controller (also known as Electronic Speed Control, or ESC), but the cost of ESCs has come down so much that there's really no reason to go brushed anymore.
Any manufacturer of decent-quality brushless motors will publish the three parameters that you need to determine the performance of the motor. These three parameters are:
Io: the "no-load current." This is how much current is required to spin the motor with zero external load on the motor. Motors have both mechanical friction as well as magnetic effects that require a certain amount of electrical current to make the motor spin even when there is no external load on the motor. The no-load current captures these various effects. It's not really a precise parameter, because the amount of current needed to spin the motor depends a bit on the RPM. But we have to work with what we've got, and usually manufacturers only give us one value of Io, often without even telling us what RPM it was measured at. Don't worry though, it'll be close enough. You want Io to be as low as possible.
Rm: the "winding resistance" or "motor resistance." This is pretty simple: it's the resistance of the windings of the motor. Just hook a multimeter up to any two of the three wires coming out of the motor and measure the resistance. That's Rm. Resistance means wasted energy, so you want Rm to be as small as possible.
KV: the "speed constant." Technically, the KV tells you how much back-EMF the motor generates for a given RPM. But to keep things simple, we usually use a different, less-precise definition: KV is approximately how fast the motor will spin at a given input voltage, assuming no external load. The units are RPM/volt. So if the motor has a KV of 1000 and you run it at 12 volts, it will spin close to 12,000 RPM (again, assuming no external load). If you put a load on it, it'll spin somewhat slower than that. Usually you want the KV to be as low as possible. Why? Because large, slowly-spinning propellers are more efficient than small, fast-spinning propellers. More on propeller design later.
Now, if you actually start comparing brushless motors, you'll run into a few disturbing realities. The first is that physically smaller motors tend to have higher KVs, and we want our KV to be as low as possible. So if you want your thruster motor to be compact, there will be a limit to how low the KV can be. The second is that motors with low KVs tend to have a high Rm. This is because, to make a low-KV motor, they put in a large number of loops of thin wire in the windings. A lot of thin wire equates to a lot of resistance. Basically, there are some physical laws getting in the way of us having everything we want.
One way of getting around some of these problems is to use a gearbox. A gearbox will essentially turn a high-KV motor into a low-KV motor. However, it takes up more space, costs more money, reduces the efficiency of the system, and adds another possible failure point. Some commercially-available thrusters use gearboxes and some don't. There's no consensus either way, so a gearbox is definitely worth careful consideration.
Either way, as a first cut, you should find two or three of the lowest-KV motors that will physically fit your application, and pick the one with the lowest Io and Rm values. Pay attention to the rated wattage of the motor as well. If the motor is advertised as a 100-watt motor and you want to run it at 200 watts, proceed with caution. It may be possible, but be careful. Similarly, if the motor is rated at 1,000 watts and you want to run it at 100 watts, there's a good chance that the motor is bigger than it needs to be for your application, and thus less efficient than other, smaller motors. So use the rated power of the motor as a general guide as to whether the motor is a good match for your application.
Calculating motor performance
Given the three parameters discussed above, you can find the current, voltage, and power draw of a motor using the equations below. Start by assuming the RPM and required power output of the motor, P_out (also known as shaft power).
motor current I = Io + P_out / (RPM / KV)
motor voltage V = RPM / KV + I * Rm
motor input power P = I * V
If you don't know the exact RPM or power output, you can make the following approximations:
RPM = KV multiplied by the approximate voltage that you want to operate at
P_out = The drag on your vehicle (in Newtons) multiplied by the vehicle speed (in m/s) divided by the propeller efficiency (assume 0.7 for propeller efficiency).
Note that none of these equations include the efficiency of the motor controller (ESC). A good ESC might reach about 90% efficiency. If you want to account for the power draw of the ESC, just divide the motor input power by 0.9 to approximate the total system power.
You'll quickly discover that there are numerous inter-dependencies between the motor, the propeller, and the vehicle. In other words, you won't be able to choose the right motor without knowing what propeller you're using, you won't be able to choose the propeller without knowing what motor you're using, you can't choose either motor or propeller without knowing the drag of your vehicle, and so on. Therefore, it becomes an iterative process involving a lot of compromise (like pretty much everything else in engineering). Fortunately, if you have your calculations organized in a spreadsheet and just start playing with it, a good answer will eventually materialize.
Propeller choice
Similar to brushless motors, propellers can be defined by a few basic parameters or coefficients. In the case of propellers, the two most important are the "thrust coefficient" and "power coefficient." The both depend on the "advance ratio," which is basically the ratio of the forward speed of the vehicle to the rotational speed of the propeller. There's a lot of good information on the internet about these parameters and how to use them (I am not going to reproduce the equations here, just google it if you're interested).
Unfortunately, it's very rare for propeller manufacturers to publish thrust and power coefficients for their propellers. The only one that I know of that publishes this information is APC, a manufacturer of propellers for R/C airplanes. If you're building a long-endurance ASV or AUV, there's a good chance that one of APC's propellers would work in your application (not saying they would be the best, just that they might work). If you're building an ROV, you're probably going to want a different kind of propeller. In that case, you will have to perform some serious analysis in order to get the data you want. That analysis is way beyond the scope of this Tech Tip, but don't despair -- we can still make some useful conclusions about propellers.
First of all, let's consider the diameter of the propeller. If you're going after efficiency (perhaps for a long-endurance ASV or AUV), you want the diameter to be as large as possible. This has to do with the difference between momentum and energy. As we learned in high school physics class, the momentum of an object depends on the speed of an object, but the energy depends on the speed squared. The thrust produced by a propeller is simply the change in momentum of the water flowing through the propeller. Therefore, just like momentum, thrust depends on the change in speed of the water, but the energy consumed by the propeller depends on the speed of that water squared. So if you want to get high thrust and low energy usage, you want the propeller to take a large amount of water and accelerate it only a little bit instead of taking a small amount of water and accelerating it a lot. This implies a large propeller with two slender blades, just like an airplane propeller.
There are plenty of considerations other than just efficiency, though. For example, you might not have room for a large propeller. Or your motor might not be capable of swinging a large propeller slowly. Or you simply might not care about energy usage, like if you have an ROV that gets power through its tether, or if you have an ASV that is only going to run for a few hours at a time and has plenty of battery capacity. In these cases, your propeller will typically be smaller in diameter, with three or four relatively fat blades. It will look more like a ski boat propeller.
Now let's talk about propeller pitch. The pitch is how many inches (or centimeters) the propeller would move forward in one rotation if it were moving through a soft solid, like wood. Propellers with lower pitch are better for producing static thrust (static thrust is the thrust produced when the vehicle is not moving forward). Higher-pitched propellers are better producing thrust at higher speed.
Nav
Hot News
-
Making an unmanned ship from scratch - a guide to the overal
 foreword First of all, if an unmanned ship is to be unmanned, it must be able to run by itself; to run by itself, it must know its own GPS co ...2022-06-16
foreword First of all, if an unmanned ship is to be unmanned, it must be able to run by itself; to run by itself, it must know its own GPS co ...2022-06-16 -
Basic concepts of brushless motors
 The brushless DC motor (BLDC) is a new type of mechatronic motor that has emerged with the development of semiconductor electronics. It is a ...2021-11-27
The brushless DC motor (BLDC) is a new type of mechatronic motor that has emerged with the development of semiconductor electronics. It is a ...2021-11-27 -
Waterproofing of brushless motors
 As you have probably already tested, a normal model airplane brushless motor is perfectly capable of operating underwater. However, when test ...2021-11-27
As you have probably already tested, a normal model airplane brushless motor is perfectly capable of operating underwater. However, when test ...2021-11-27