INDUSTRY NEWS
What is the core problem to be solved by underwater robots?
The core issues of underwater robots are still underwater communication, intelligent control, range and propulsion. Usually when we talk about underwater robots we mainly refer to unmanned submersible vehicles, including ROV and AUV two kinds.
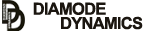
ROVs (underwater robots with cables)
ROVs do not have problems with range or communication and are relatively easy to control, obtaining power and receiving control signals from the mother ship through cables.
The ROV mainly consists of a surface end and an underwater end. The surface end contains the power supply system, console, cable winch, etc. The underwater end contains the submersible body and the thrusters, cameras, lights, depth sensing go, and operational tools (robotic hand, cutter) mounted on the body, mainly for underwater inspection and detection applications.
Although cables provide sufficient range and relatively easy teleoperation control, they limit the space in which underwater ROVs can operate and the variety of operations, based on which autonomous underwater robots have been created.
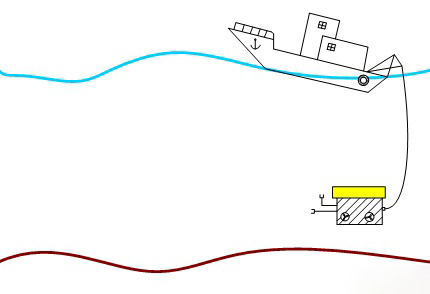
AUVs (Autonomous Underwater Robots)
Autonomous underwater robots (AUVs), also known as cableless underwater robots, are mainly used for underwater capture and fishing.
Both are a challenge as they are not powered by the mother ship and rely on their own carrying power modules for power supply, and underwater cableless robots generally rely on hydroacoustic communication, which has a time delay phenomenon and makes real-time control difficult.
On the other hand, AUVs are autonomous navigation, relying on various sensors, identifying unfamiliar environments, building environmental models, making autonomous decisions, avoiding obstacles and arriving at designated points to complete their tasks, integrating technologies such as image recognition, hydroacoustic communication, information fusion, path planning, autonomous obstacle avoidance and intelligent control, which are yet to continue to break through.
In short, ROV by surface staff real-time observation of underwater and remote remote operation, the degree of intelligence is not high, the disadvantage is that there are cable restrictions, limited space for activities, AUV activity range, but range, communication, intelligent control is a challenge.
Nav
Hot News
-
Making an unmanned ship from scratch - a guide to the overal
 foreword First of all, if an unmanned ship is to be unmanned, it must be able to run by itself; to run by itself, it must know its own GPS co ...2022-06-16
foreword First of all, if an unmanned ship is to be unmanned, it must be able to run by itself; to run by itself, it must know its own GPS co ...2022-06-16 -
Basic concepts of brushless motors
 The brushless DC motor (BLDC) is a new type of mechatronic motor that has emerged with the development of semiconductor electronics. It is a ...2021-11-27
The brushless DC motor (BLDC) is a new type of mechatronic motor that has emerged with the development of semiconductor electronics. It is a ...2021-11-27 -
Waterproofing of brushless motors
 As you have probably already tested, a normal model airplane brushless motor is perfectly capable of operating underwater. However, when test ...2021-11-27
As you have probably already tested, a normal model airplane brushless motor is perfectly capable of operating underwater. However, when test ...2021-11-27